Sidebar
Super User
如何理解ISO15765-4协议和ISO15031-5协议
Data transmission functional unit data-parameter definitions
The parameter dataIdentifier (DID) logically represents an object (e.g., Air Inlet Door Position) or collection of objects. This parameter shall be available in the server's memory. The dataIdentifier value shall either exist in fixed memory or temporarily stored in RAM if defined dynamically by the service dynamicallyDefineDataIdentifier. In general, a dataIdentifier is capable of being utilized in many diagnostic service requests including 0x22 (readDataByIdentifier), 0x2E (writeDataByIdentifier), and 0x2F (inputOutputControlByIdentifier). A dataIdentifier is also used in various diagnostic service responses (e.g., positive response to service 0x19 subfunction readDTCSnapshotRecordByDTCNumber).
IMPORTANT — Regardless of which service a dataIdentifier is used with, it shall consistently
represent the same thing (i.e., a given object with a given size / meaning / etc.) on a given ECU.
SID,PID应用详细分析
早期KWP2000/Can协议培训,主要从物理层,链路层方面讲解这两种协议在汽车通信中的物理属性,电气属性,帧结构,交互方式,应答方式等,应用层中只提到了几个常见的应用,如系统进入,读版本信惠,读故障码,清除故障码,读数据流等。在实际通讯数据中,以上应用功能均用到了各种恃定格式的命令,以及命令组合;有些复杂恃殊功能甚至用到了更多的命令组合。这些特定格式的命令组合即为今夫我们要讲的SID、PID应用。
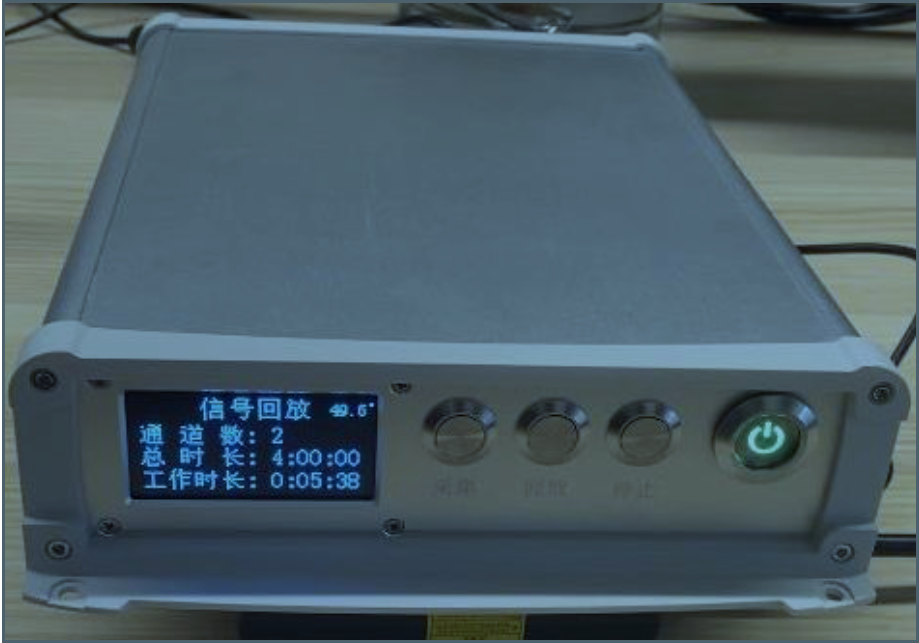
GPS singal acquisition,replay and test equipment
AI intelligent tongue imager
